건설, 플랜트 분야에서 스캐닝 기술을 적극적으로 활용하는 사례가 많아짐에 따라, SLAM, LiDAR, UAV(Unmanned Aerial Vehicle) 캡처 기술 개발 투자가 계속되고 있다. 레이저 스캐닝은 AEC(Architecture, Engineering and Construction) 내에서 빠르게 채택되는 기술이 되고 있다. 이는, 전통적으로 측량 영역이었지만, 더 작고 저렴한 스캔 장치가 개발되고, 현장에 실용성과 효과가 검증되어 점차 활용사례가 많아지고 있다. 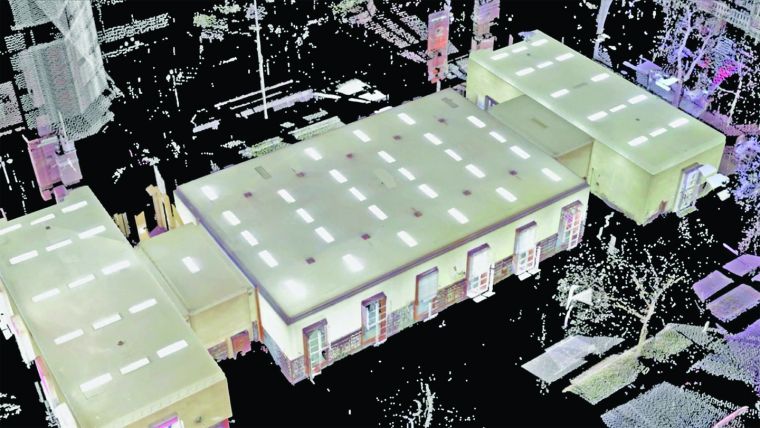 SLAM과 하이브리드 스캔 데이터 처리 기술 SLAM(Simultaneous localization and mapping) 기술과 같은 스캔 기술의 혁신은 고정식 삼각대를 옮겨가며 스캔을 하는 반복 작업에서 엔지니어를 해방시킬 수 있다. SLAM은 실시간 스캔 데이터 캡쳐가 가능해, 작업 비용을 낮춘다. 이 경우에는 어느 정도 정확도를 희생해야 했다.  SLAM 기반 스캔(NavVis VLX) SLAM 기반 스캔 방식이 활용되면서, 엔지니어는 프로젝트에서 스캐닝 기술을 서로 혼합하여 사용하기 시작했다. 이를 위해, SLAM 과 같은 스캔 밀도가 다른 데이터 스캔 방식과 고밀도 스캔 데이터를 자동 정합하고, 고밀도 데이터를 확인 및 검수하는 기능이 필요하다. Correvate(영국 런던)는 중복된 스캔 데이터들 간에 자동 정합을 지원하는 클라우드 플랫폼인 Vercator 서비스를 릴리즈했다. University College London의 전자 공학 연구소에서 개발한 기술을 사용하는 포인트 클라우드 자동 정합 기술은 다양한 밀도의 스캔 데이터를 자동으로 정합한다. Correvate 데이터 정합 과정 Correvate는 수동 정합보다 60-80% 더 빠르며, 신뢰성있는 결과를 제공했다. 이 기술은 SLAM데이터 처리 기능을 통합했다. 이 회사의 CEO는 엔지니어들이 다양한 스캔 장치를 사용하고 있다는 것에 주목했다. 트림블, Leica, Faro 등 정적 방식의 스캐너를 사용하던 회사는 특정 프로젝트에서 GeoSLAM, Paracosm 스캐너를 함께 운영하기 시작했다. 다양한 프로젝트 요구 사항에 맞게 다양한 데이터 LoD(Level of Detail), 다양한 정확도, 허용 오차를 캡처하기 위한 수요가 증가했다. 만약, 소프트웨어적인 포인트 클라우드 데이터 노이즈 필터링, 정합 등이 특정 요구수준에 맞게 처리된다면, 몇천만원 수준의 스캔 솔류션으로 7천만원 이상의 스캔 솔류션을 대치할 수 있다. 이를 위해, 해당 소프트웨어는 몇가지 전략을 사용한다. 예를 들어, SLAM의 약점은 기다란 선형 스캔 프로젝트이다. 이 경우, 데이터 캡쳐 구간을 나누어 처리한다. 지금까지 데이터 처리 솔류션은 기존 글로벌 스캐너 개발 업체의 전용 소프트웨어를 사용하거나, CloudCompare 같은 불편한 오픈소스 기반 솔류션을 사용해야 했다. 회사 CEO는 많은 업체에서 모바일 데이터, 드론, 휴대용 스캐너에서 캡처한 SLAM 데이터를 가지고 와서 이 모든 것을 함께 정렬하기를 원하였다고 말한다. 만약, SLAM을 사용하면, 스캔 시 오차가 누적되는 문제가 발생하지만, 정합 알고리즘을 향상해, 100% 성공률로 변환시킬 수 있다. SLAM 데이터와 정적 스캔 데이터에 대한 자동 정합이 가능하다. 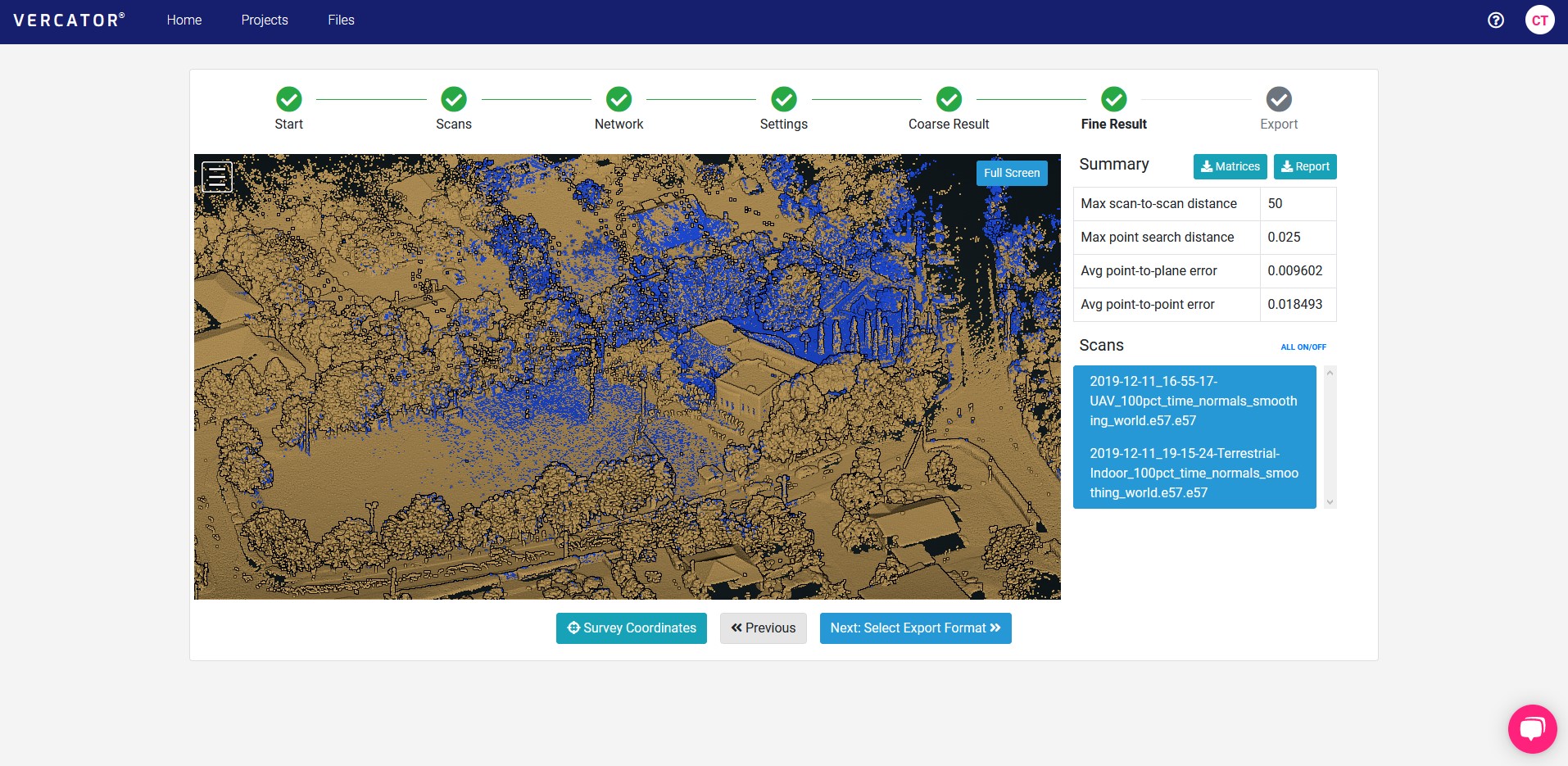 Hybrid registration on cloud(Correvate) 정합은 클라우드에서 진행된다. 앞서 언급된 플랫폼은 짧은 시간에 분할된 스캔 데이터를 클라우드로 전송한다. 데이터의 타임스탬프에서 실제로 스캔 순서를 얻고, 정합 알고리즘을 실행한다. Scan To BIM 포인트 클라우드가 자동으로 BIM(Building Information Modeling)으로 변환되는 Scan-to-BIM은 현재로서는 어려운 장애물이 많다. 전세계에 이를 현실화하기 위해 노력하는 회사가 많이 있다. 그 중 하나인 이 회사는 데이터 연금술로 스캔 데이터인 3D 포인트를 벽, 문 및 창으로 맵핑하는 기술을 개발하고 있다.  Scan To BIM(NAVVIS) BIM으로 맵핑하려면, 스캐너에서 최대한 많은 데이터를 가져오는 것이 중요한다. 이를 위해서는 API, 컬러 등에 대한 데이터 접근이 필요하다. 일부 스캐닝 회사는 고가의 포인트 클라우드 소프트웨어에 대해 매우 방어적이다. 이 회사는 스캔 데이터 분석을 통해 개선된 기능의 제품을 개발할 계획이다. 마무리 스캐너의 가격은 점점 저렴해지고, 기능은 강력해 지고 있다. Faro는 약 3천만원에 휴대성이 뛰어난 스캐너를 시장에 출시했고, Leica도 저렴한 가격의 BLK360을 출시했지만, 처리하기 매우 어려운 포인트 클라우드 지원 소프트웨어 플랫폼을 상품화하기 위해 서두르지는 않았다. 이제 아이폰과 같은 휴대폰, 태블릿에서 LiDAR 데이터를 얻을 수 있지만, 전문 응용 목적에 필요한 정확도와 밀도의 데이터를 얻는 것과는 거리가 멀다. 현재 시장은 목적에 따라 하이브리드 방식의 스캔 데이터 처리 기술을 채택하고, 필요에 따라 값비싼 최고의 기술을 사용하고 있다. SLAM 시장은 생산성에 강점이 있어 틈새시장을 개척하고 있다. Correvate의 Vercator 클라우드와 같은 서비스들은 이런 다양한 스캔 데이터를 처리할 수 있도록 진화하고 있다. 레퍼런스
|




댓글 없음:
댓글 쓰기